
$50 Visual SLAM in ROS Using a Modified PlayStation Camera
Overview
This project served as a refresher for ROS after completing my undergraduate in engineering and to give me the opportunity to educate myself about how stereo imaging and Visual SLAM is applied in ROS.
The PlayStation VR camera is an inexpensive, off the shelf, stereo camera that can be found on the second hand market for <$50. This project turned it into an accessible avenue for 3D mapping, SLAM, and stereo imaging in ROS.
I developed the ROS nodes necessary to use the PlayStation VR stereo camera as an input device for popular VSLAM packages such as ‘RTAB-Map’ and ‘stereo_image_proc’. This project built off the work from Hackinside who developed the drivers so the camera would function as a usb device.
The node publishes individual, time synchronized images from the PlayStation cameras left and right sensors. It applies colour formating, cropping, frame IDs, metadata, and loads each cameras calibration info.
The project is packaged for easy installation with your ROS projects.
Proficientcies
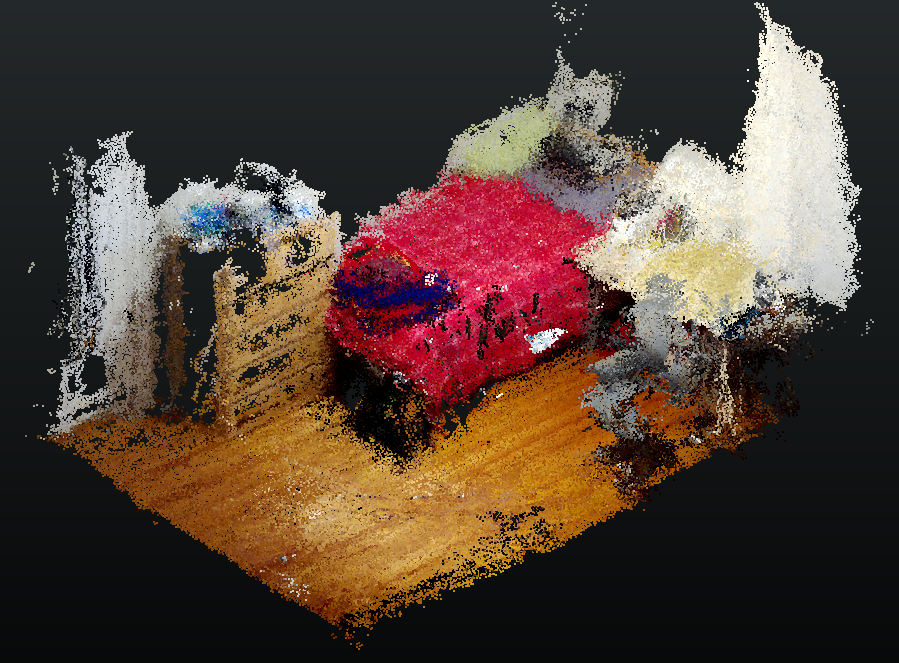
Media

Further Readings
