
Spot Explores Simulated Disasters With Robotic Ears
Overview
My master thesis was titled “Sound Source Tracking as a Heuristic for Frontier Exploration in Search and Rescue using a Quadruped Mobile Robot.”
This was a full systems integration project, including mapping, behavioral modelling, localization, perception, control, and hardware development. It was designed around the Spot quadruped robot developed by Boston Dynamics.
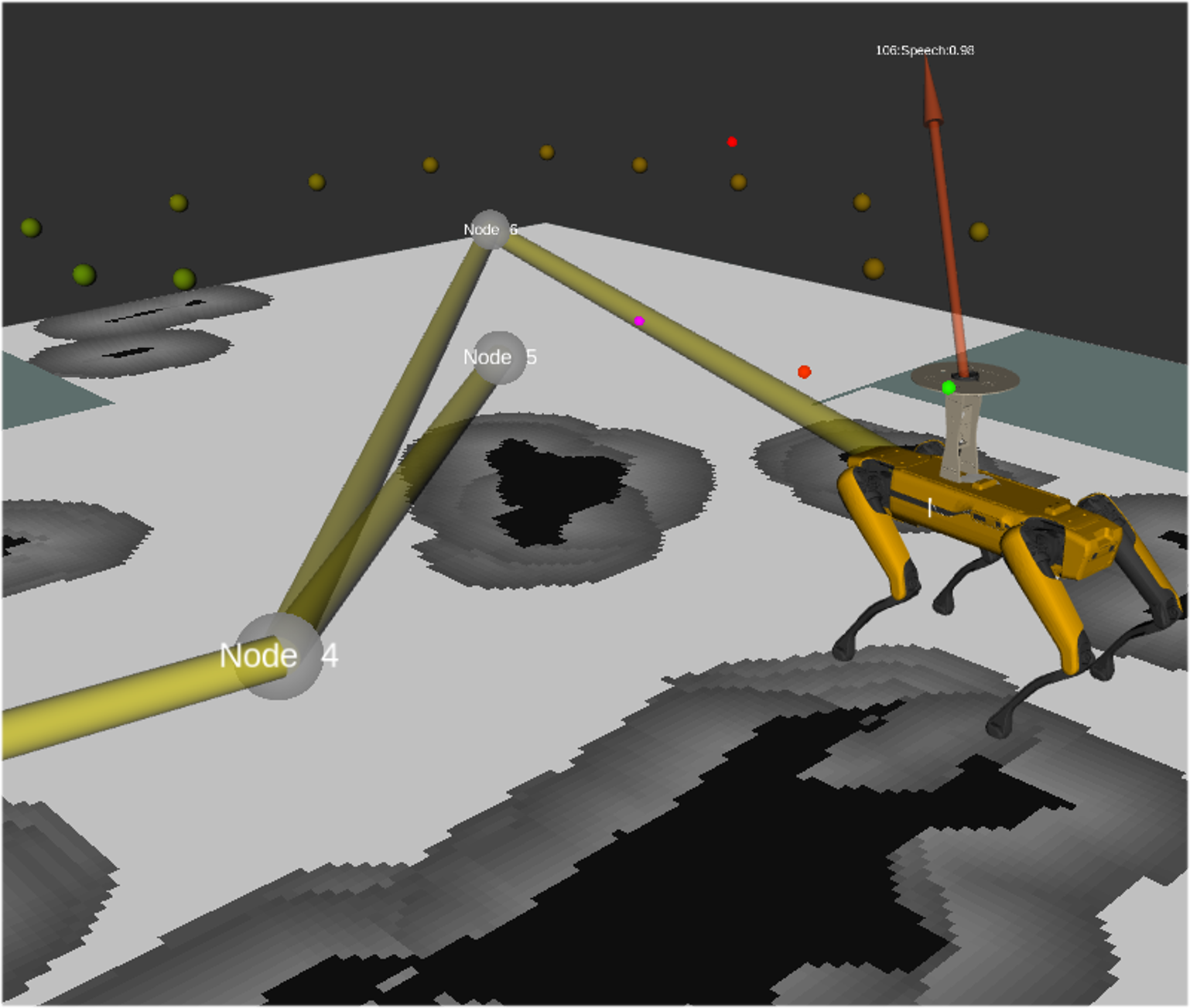
I developed Spot to explore previously unmapped environments while tracking the sounds of human speech. The direction of the incoming sound was used to intelligently decide where to search next. Much like human search parties, this system used human voice as a compass, building a map of its environment as it searched for the target source.
Experimentation was performed in ideal lab environments, semi-structured simulated urban disaster scenarios, and unstructured forest terrain. I performed field trials at the Kingston Fire and Rescue Training Facility and got to participatre in the 2023 NSERC Canadian Robotics Network field trials. My results concluded that sound source tracking was a capable heuristic, demonstrating a viable concept where autonomous disaster robots could be improved by giving them the ability to listen for people needing help.
I was fortunate enough to present my findings at IROS 2023 Detroit.
Proficientcies
Media


Further Readings
*Special thanks to Ingenuity Labs and Professor Joshua Marshall
